Use Case 1: Enhancing Autonomous Driving with Device-Edge-Cloud Intelligent Collaboration Framework
Various use cases in a connected and autonomous driving environment require collaboration with the traffic infrastructure, providing an autonomous vehicle with more sense of awareness and more room for cooperation with other vehicles. Such scenarios bring stringent requirements for latency and reliability. In order to meet these requirements, our DECICE Framework aims to effectively and energy-efficiently handle the management of the resources in the computing continuum using an AI-based scheduler.
The project and consortium
“Connected and autonomous vehicle” is an autonomous vehicle enhanced with reliable wireless connectivity for increased awareness of the environment. While LiDARs, radars, and cameras provide perception to some degree, V2X (vehicle-to-everything) communication has more to contribute in order to increase the autonomous vehicle’s perception.
V2X communication is an enabling technology for autonomous driving for all levels of autonomy since it provides tremendous information for the vehicle about its surroundings. While this information can include the position and the status reported by the surroundings, it can also contain the planned manoeuvres to prepare the concerned users in advance. Moreover, road users’ perception is increased further by enabling sensor sharing between the users.
Vulnerable Road User (VRU) Safety is one of these V2X applications which is included in the Day2 and Day3+ phases of Car 2 Car Communication Consortium [1]. It is also a use case defined and led by VeNIT Lab, Marmara University in the DECICE project, where semi- or fully-automated vehicles collaborate with the infrastructure to detect risky situations threatening the safety of VRUs which are pedestrians, cyclists, motorcyclists, etc. Since a vehicle’s sight is limited to its sensors and other objects can obstruct it, the V2X application aims to notify them with the information of detected VRUs’ positions and the collision risks detected using the mounted cameras on the road. BigTRI is one of the collaborating partners in the use case deployment for testing and validating the DECICE framework’s features.
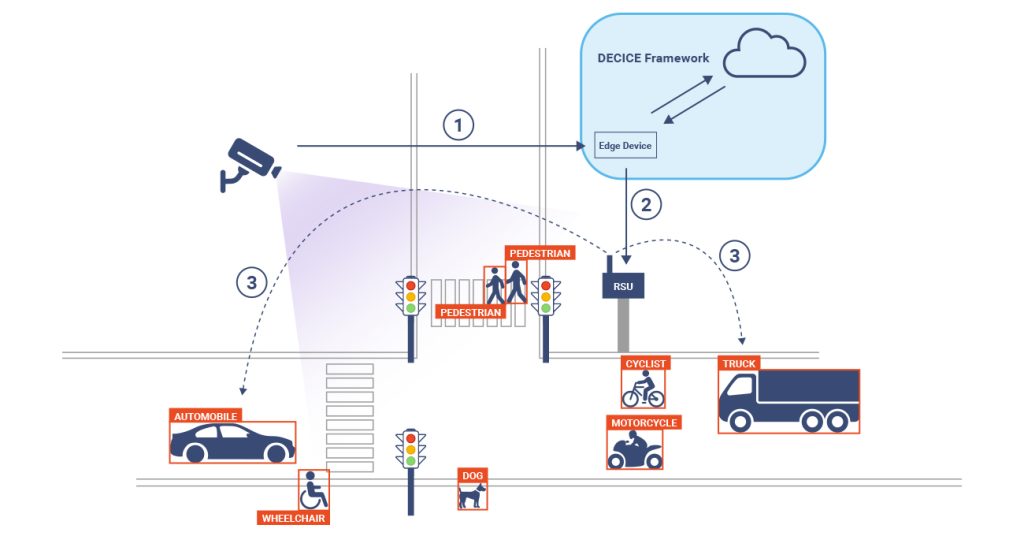
VRU Safety application requires multiple entities in the computing continuum to work in collaboration with strict requirements for latency and reliability. Considering 3GPP standards [2], 5GAA recommends having a minimum of 20 milliseconds of end-to-end latency (100 milliseconds in the worst case) with 99.9% service reliability for the use case [3]. While this requires real-time and fast detection and decision systems, it is also needed to effectively handle the scheduling of the resources in the computing continuum since notification of a single event will include delays in the detection and decision process, data transmission, and processing at the receiver. In addition to the real-time requirements, the use case needs effective management of the network resources for inference transfer and incremental learning.
DECICE framework offers a potential solution for effectively and energy-efficiently handling such requirements in the computing continuum since an AI-based scheduler will consider the network and hardware resources and constraints to find a (near-)optimal and feasible solution. Deployment of the tasks accordingly and reacting to changing situations in the continuum effectively can make DECICE a powerful tool for managing and providing cooperative services (e.g. collective perception) for connected autonomous driving in the infrastructure.
Authors: Berkay Yaman (BigTRI Bilisim A.S.), Mujdat Soyturk (VeNIT Lab, Marmara University)
Reference
[1] Car 2 Car Communication Consortium (2021): Guidance for day 2 and beyond roadmap. White Paper
[2] 3GPP, 5G (2022): Service requirements for enhanced V2X scenarios. 3GPP TS 22.186 version 17.0.0 Release 17. Technical Specification, European Telecommunications Standards Institute
[3] 5GAA Automotive Association (2023): C-V2X Use Cases and Service Level Requirements. Volume I. Technical Report
Keywords
autonomous-vehicle, autonomous-driving, v2x, c-its, computing-continuum, cloud, edge, smart-city, cognitive-cloud